

Стабильность — одно из важнейших требований к гидравлической системе экскаватора с дистанционным управлением.
Введение
Устойчивость является одним из наиболее важных требований к гидравлической системе дистанционно управляемого экскаватора. В отличие от обычных экскаваторов, управляемых непосредственно оператором на борту, дистанционно управляемые машины полностью зависят от электрогидравлической трансмиссии и логики управления для преобразования командных сигналов в физическое движение. Любая нестабильность в гидравлической системе немедленно отражается на поведении машины.
Неустойчивое движение не только снижает точность работы, но и увеличивает риски для безопасности, особенно в опасных средах, где чаще всего используются дистанционно управляемые экскаваторы. На практике проблемы устойчивости в дистанционно управляемых экскаваторах тесно связаны с поведением гидравлической системы.
Для решения этих проблем требуется системный анализ и целенаправленная гидравлическая оптимизация, а не локальная корректировка параметров.
Почему устойчивость сложнее обеспечить в экскаваторах с дистанционным управлением
Отсутствие прямой компенсации со стороны человека
В обычных экскаваторах операторы подсознательно компенсируют недостатки системы, регулируя ввод с джойстика в реальном времени. В дистанционно управляемых экскаваторах этот естественный контур обратной связи, создаваемый человеком, ослаблен или замедлен, что делает внутреннюю устойчивость гидравлической системы гораздо более важной.
Даже незначительные нелинейные эффекты внутри гидравлической системы могут вызывать: рывки при запуске и остановке; колебания во время работы на низких скоростях; непостоянную реакцию исполнительного механизма при изменении нагрузки; эти эффекты усиливаются при наличии задержки сигнала и ограниченной визуальной обратной связи.
Типичные проблемы устойчивости в дистанционно управляемых экскаваторах
Ползучая неустойчивость на низких скоростях
Одной из наиболее распространенных проблем является нестабильное движение во время работы на низких скоростях или при выполнении задач точного позиционирования.
Гидравлические приводы могут давать сбои, внезапно подпрыгивать или колебаться при подаче небольших управляющих воздействий.Такое поведение в основном вызвано пропорциональными мертвыми зонами клапанов, нелинейными характеристиками потока при малых открытиях клапанов и недостаточным разрешением сигналов обратной связи по давлению, что снижает управляемость на низких скоростях.
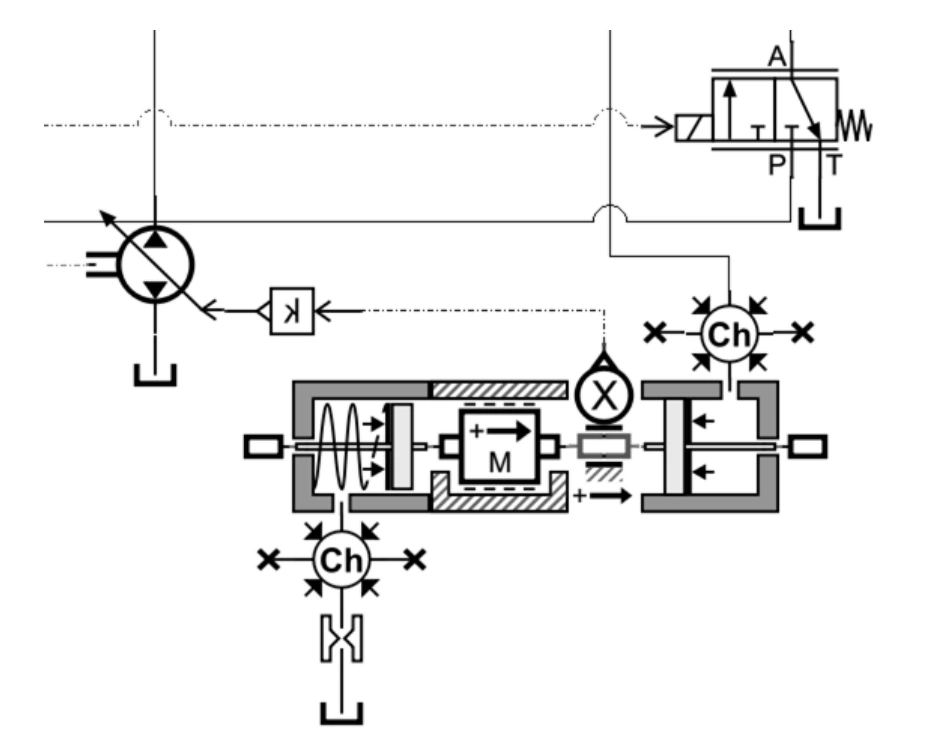
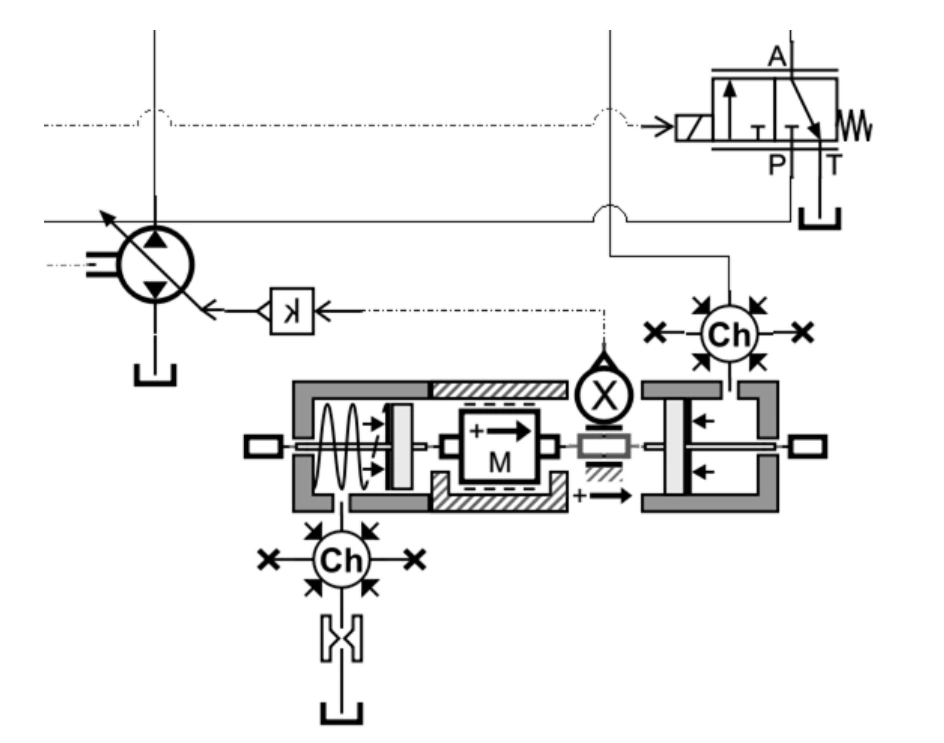
Модель моделирования Насос с регулируемым рабочим объемом
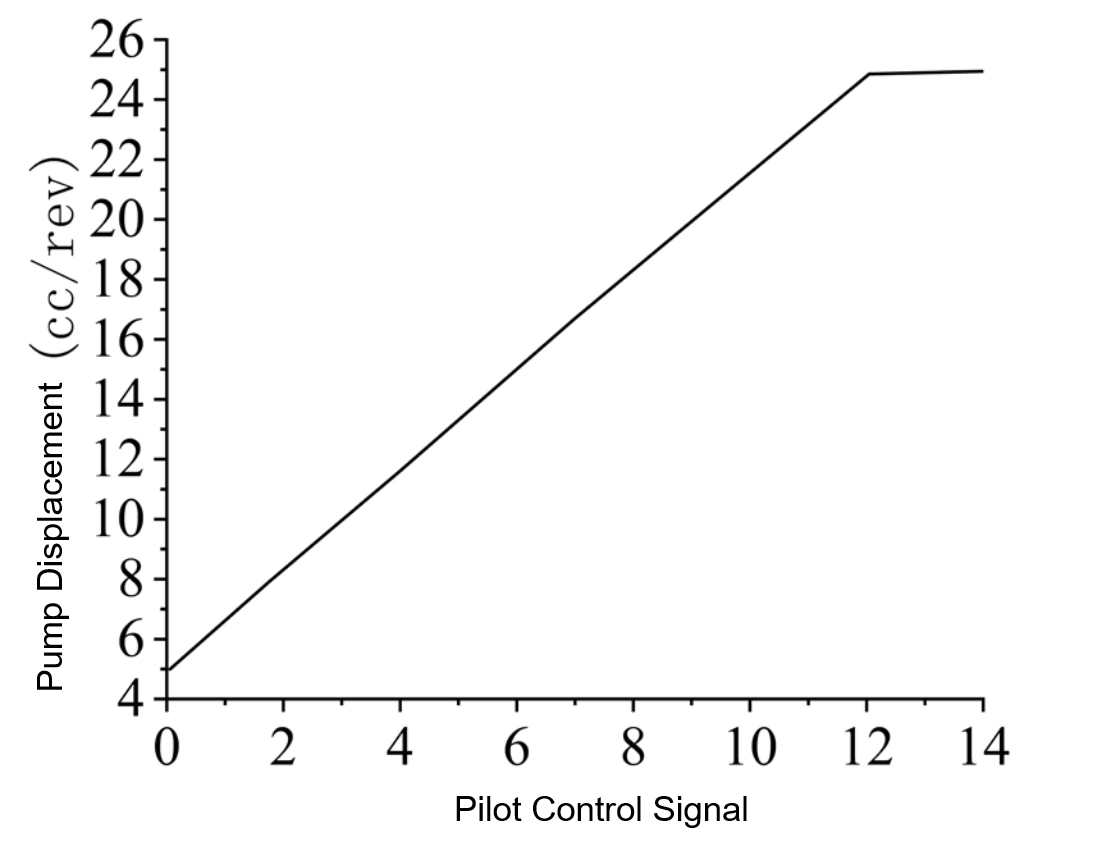
Кривая характеристик регулирования потока насоса с регулируемым рабочим объемом
Колебания при переменных условиях нагрузки
Сопротивление выемки постоянно изменяется во время земляных работ. Без надлежащей компенсации эти колебания нагрузки могут вызывать колебания давления, приводящие к осцилляциям или перерегулированию в движении цилиндра.
Экскаваторы с дистанционным управлением особенно чувствительны к этой проблеме, поскольку изменения нагрузки не могут быть немедленно компенсированы посредством прямой обратной связи от оператора, что предъявляет более высокие требования к внутренней стабильности системы.
Задержка реакции и перерегулирование
Задержки передачи сигнала, присущие системам дистанционного управления, могут вызывать фазовый сдвиг между входным сигналом команды и реакцией исполнительного механизма.
В сочетании с гидравлической нелинейностью эта задержка часто приводит к перерегулированию или повторным циклам коррекции, снижая эффективность работы.
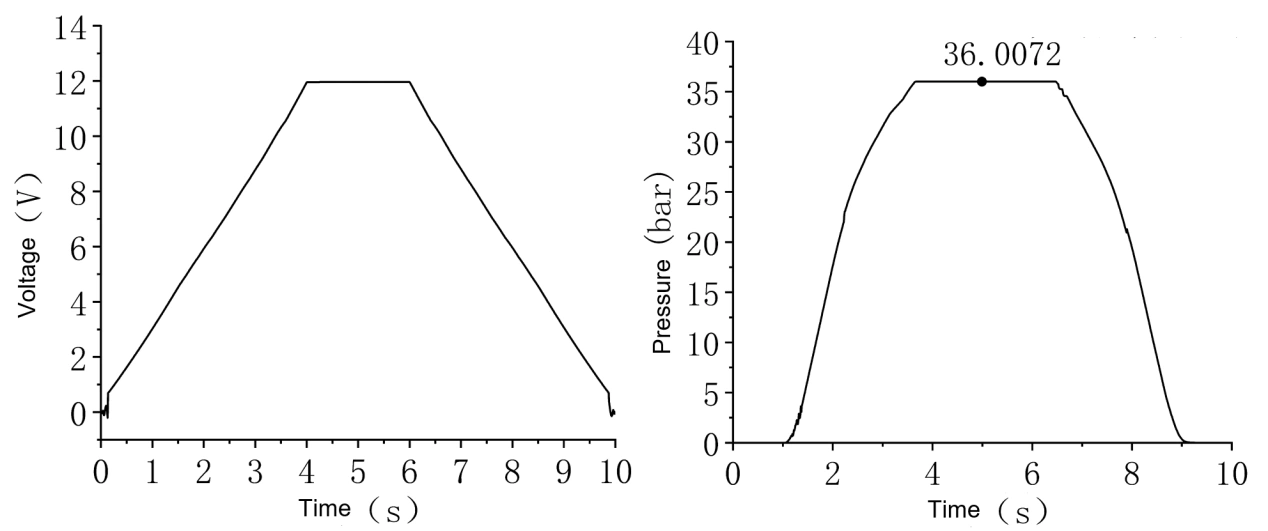
Результаты моделирования электромагнитного пропорционального предохранительного клапана
Root Причины на уровне гидравлической системы
Нелинейность клапана и мертвые зоны
Пропорциональные распределительные клапаны являются важными компонентами гидравлической системы экскаватора с дистанционным управлением. Однако мертвые зоны и гистерезис являются неизбежными физическими характеристиками.
Без компенсации эти нелинейности нарушают связь между управляющим воздействием и гидравлическим выходом, особенно при работе на низких скоростях.
Эффекты связи потока и давления
На расход гидравлической жидкости влияет не только открытие клапана, но и разница давлений на клапане.
При изменении давления нагрузки один и тот же управляющий сигнал может приводить к разным скоростям приводов, что подрывает предсказуемость системы.
Связь между несколькими приводами
Экскаваторы часто одновременно управляют несколькими гидравлическими приводами. Взаимодействие давлений между контурами может вызывать эффекты связи, которые ухудшают общую стабильность системы, если ими не управлять должным образом.
Решения на уровне гидравлической системы для повышения стабильности
Нелинейная компенсация как основная стратегия
Нелинейная компенсация устраняет фундаментальное несоответствие между управляющим входом и гидравлическим выходом.
Изменение формы управляющих сигналов для противодействия мертвым зонам и нелинейному поведению потока позволяет значительно улучшить устойчивость во всем диапазоне рабочих режимов.Этот подход особенно эффективен для дистанционно управляемых экскаваторов, где предсказуемая реакция имеет важное значение.
Интегрированное управление с обратной связью
Для повышения устойчивости требуется нечто большее, чем просто компенсация в разомкнутом контуре.
Благодаря интеграции обратной связи по перемещению и давлению в систему управления, отклонения, вызванные изменением нагрузки или внешними возмущениями, могут корректироваться в режиме реального времени.Оптимизированная структура обратной связи позволяет гидравлической системе поддерживать стабильное движение даже при прерывистых или запаздывающих командах дистанционного управления.
Оптимизация параметров системы
Параметры гидравлической системы, такие как коэффициент усиления клапана, коэффициенты демпфирования и полоса пропускания управления, должны быть оптимизированы специально для дистанционного управления.
Настройка параметров, подходящая для обычных экскаваторов, может быть непригодна для платформ с дистанционным управлением.Оптимизация на основе моделирования играет ключевую роль в определении стабильных диапазонов параметров без обширных физических испытаний.
Проверка с помощью моделирования и тестирования
Результаты моделирования показывают, что оптимизация на системном уровне может значительно снизить проблемы со стабильностью в экскаваторах с дистанционным управлением в типичных условиях эксплуатации.
Ключевые улучшения включают: уменьшение амплитуды колебаний; более быстрое время установления; улучшенную точность отслеживания.
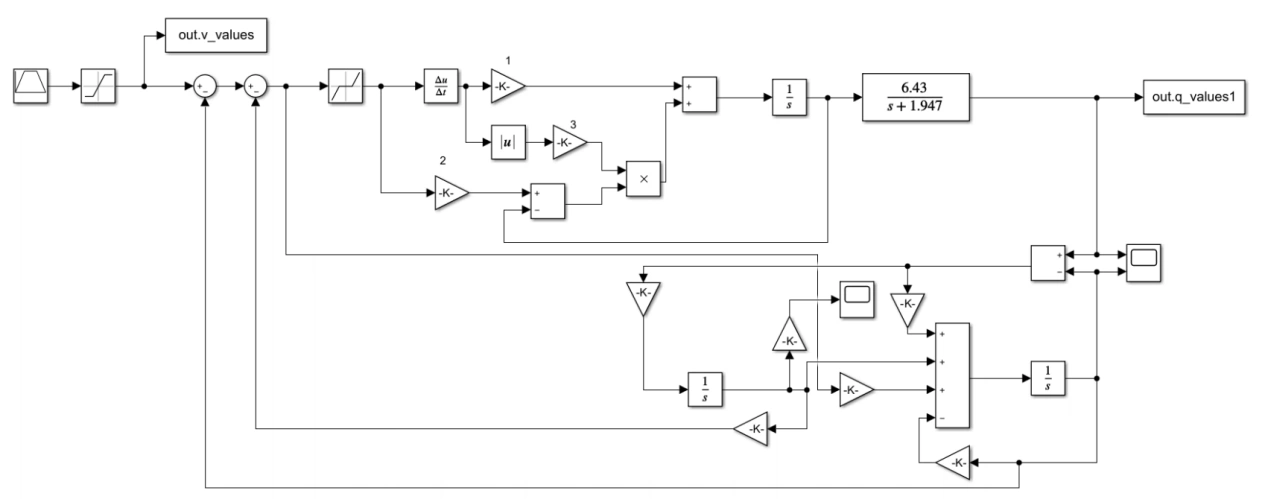
Модель моделирования контроллера
Практические преимущества для применения в экскаваторах с дистанционным управлением
Более безопасная работа в опасных условиях
Стабильное гидравлическое управление минимизирует неожиданные движения, что крайне важно при использовании дистанционно управляемых экскаваторов в зонах сноса, замкнутых пространствах или условиях с ограниченным доступом людей.
Повышенная точность для выполнения точных задач
Повышенная стабильность позволяет дистанционно управляемым экскаваторам выполнять точные задачи, такие как выравнивание грунта, заделка траншей и укладка материалов, с большей точностью.
От проектирования до внедрения в производство
Преобразование решений по обеспечению гидравлической стабильности в готовые к производству системы требует тесной интеграции между проектированием системы управления и производственными процессами.
С инженерной и производственной точки зрения, внедрение стратегий оптимизации гидравлики на системном уровне обеспечивает надежность, масштабируемость и пригодность для длительной эксплуатации в платформах дистанционно управляемых экскаваторов.Внедряя принципы проектирования, ориентированные на устойчивость, в гидравлические системы дистанционно управляемых экскаваторов, производители могут поставлять оборудование, отвечающее как техническим, так и эксплуатационным требованиям.
Заключение
Проблемы устойчивости в дистанционно управляемых экскаваторах возникают из-за нелинейности гидравлической системы, изменения нагрузки и задержки сигнала. Решение этих проблем требует системного подхода, сочетающего нелинейную компенсацию, обратную связь и оптимизацию параметров.
Хорошо спроектированная гидравлическая система дистанционно управляемого экскаватора не только повышает безопасность эксплуатации, но и расширяет практическое применение технологии дистанционно управляемой экскавации.
Стабильность перестала быть второстепенным фактором — это ключевое требование к современным интеллектуальным системам экскаваторов.